ProductsSensing Systems
Intelligence Through Perception
Sensing Systems
Advanced sensor arrays that give humanoid robots the ability to perceive and interact with their environment. From 6-axis force/torque sensors to tactile arrays and vision modules.
80+Sensor Types
±0.1%Accuracy
<1msResponse
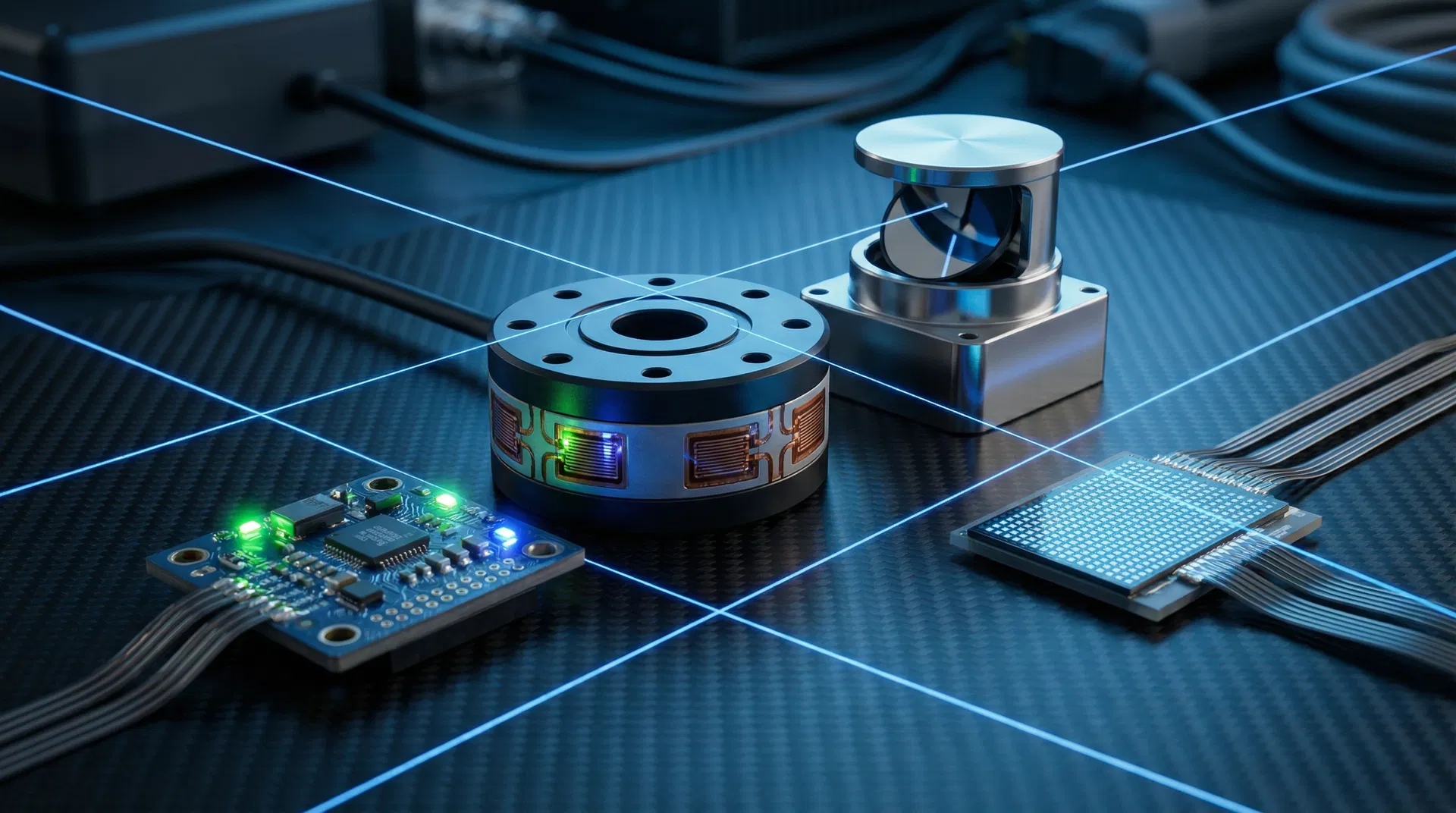
Force/Torque
HRP-FTS 6-Axis Force/Torque Sensor
High-precision 6-axis force/torque sensor for wrist and ankle joints. Enables compliant manipulation and stable locomotion with real-time force feedback.
Fx/Fy/Fz: ±100–2000N
Tx/Ty/Tz: ±5–200Nm
Resolution: 0.025%
Overload: 300% FS
Bandwidth: 1kHz
Inertial
HRP-IMU 9-DOF Inertial Measurement Unit
High-performance IMU combining accelerometer, gyroscope, and magnetometer. Essential for humanoid robot balance control and motion estimation.
Accel range: ±2/4/8/16g
Gyro range: ±250–2000°/s
Update rate: 1kHz
Noise: 0.004°/s/√Hz
Size: 12×12×3mm
Tactile
HRP-TAC Tactile Sensor Array
Flexible tactile sensor array for robot fingertips and palm. Provides distributed pressure sensing for dexterous manipulation tasks.
Spatial resolution: 4mm
Pressure range: 0–100kPa
Array size: 4×4 to 16×16
Flexible substrate
I2C interface